
|

|
How to land on the Moon
TeamIndus is India's first privately funded space initiative and they are spearheading the Indian challenge to claim Google Lunar X prize to reach the moon. TeamIndus discusses how to descend a craft on lunar surface.
The knowledge of the spacecraft's position, velocity and attitude is fed to the guidance program which calculates the required attitude and thrust to be achieved in the next computation cycle. The control system program orchestrates firing of the main engine and control thrusters to land the spacecraft gently on the lunar surface.
Landing on the moon is indeed rocket science. To date, only three countries have successfully landed on the moon -USA, former USSR and China -proving that it is one of the most challenging of space missions. These were achieved by the respective government space agencies with budgets in billions of dollars and many years of prior space technology expertise to rely upon. This ought to give an idea of the complexity involved in such an attempt.
Through this short piece, we aim to give you some information on the lunar descent strategy developed at TeamIndus for this mission. TeamIndus is India's privately led space mission company and official entry for the Google Lunar X prize requiring softlanding a spacecraft on the lunar surface.
Understanding Orbits Before Descent
In preparation for descent, the spacecraft's orbit is changed from a 100 km x 100 km circular orbit (called S3) to a 15 km x 100 km (S4) orbit as shown in the diagram:
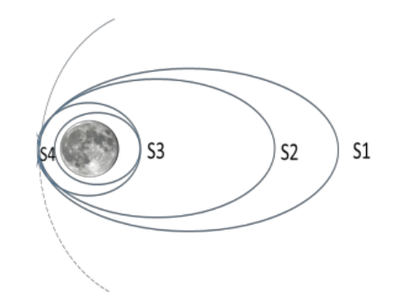
In order to land on the lunar surface in a fuel-efficient manner, the spacecraft needs to start descending from the lowest point in the S4 orbit (periapsis), which is 15 km. The lowest point of the S4 orbit depends on the nature of the S3 orbit, which is where the physics advantage of the circular orbit comes in.
Had S3 been an elliptical orbit like S2, the closest point for descent would lie where S4 is marked in the diagram. For efficiency reasons, the descent needs to start from this point leaving no flexibility in choosing the longitude of the landing site. What we are doing is perform a fuel- efficient burn in such a way that the S3 orbit is circular. A circular orbit allows for flexibility in choosing the lowest descent point to lie anywhere in the next orbit (S4) and thus flexibility in targeting the landing site.
Hardware
Apart from the necessary subsystems pertaining to power, thermal, computation etc, the key hardware required for descent are the sensors; (a) Laser Rangefinders (LRF), (b) Laser Altimeters (LA), (c) Descent Cameras (LDS), and (d) Inertial Measurement Unit (IMU).
Parameters measured during descent
After a single S4 orbit during which the team performs a sensor-checkout, the spacecraft descent sequence is initiated. From then on, the spacecraft functions autonomously until touchdown; no telecommands are sent from TeamIndus Mission Operations Center (TIMOC) although the spacecraft continues to relay telemetry data back to TIMOC.
The key parameters that feed into the on-board computer (OBC) and used by descent algorithm are: (a) Attitude, (b) Rotation Speed, (c) Translation velocity and (d) Altitude.
The Laser Altimeters (LA) provide data used to derive altitude. The LRFs on the other hand are used to obtain finer altitude measurements at close range only during terminal descent -from 100 meters above the lunar surface.
The IMU plays a key role as the primary sensor for navigation of the spacecraft. An IMU comprises a set of highly precise accelerometers and gyros. For easier understanding, think of IMUs as modern day smartphones that allow you to perform motion-control or play motion- based mobile games. The IMU measures even the minutest of changes allowing our algorithms to determine the lander's orientation. During the orbital phase, the Flight Dynamics team can predict position and velocity with the required degree of accuracy. Hence as the descent sequence gets initiated and with this information available to the on-board computer, acceleration is tracked and fed into a mathematical model that can propagate position and determine velocity as the spacecraft decelerates and approaches the landing site.
The knowledge of the spacecraft's position, velocity and attitude is fed to the guidance program which calculates the required attitude and thrust to be achieved in the next computation cycle. The control system program uses the guidance and navigation commands to orchestrate firing of the main engine and the reaction control thrusters in synchronized firing patterns to land the spacecraft gently on the lunar surface.
Descent Profile
From 15 km above the lunar surface, at which the descent sequence is initiated, till touch-down takes place 1000 seconds (~16 min) later, the main engine and all 16 reaction control thrusters are engaged either simultaneously or in a sequence determined by the phase.
Braking: In the initial braking sequence, the main engine and all 16 thrusters fire continuously. The spacecraft which is traveling at ~1700 m/s and 1000 km downrange (distance from landing site) has its velocity reduced to 500 m/s.
Approach & Turn: During the approach phase, braking continues with main engine along with 16 thrusters firing. Velocity further reduces to just 5 m/s. At this point, the spacecraft is nearly above the desired landing site. The thrusters are fired in a manner that orients the spacecraft such that the landing legs point toward the lunar surface and a vertical terminal descent can begin.
Terminal Descent: The spacecraft is now about 100 meters from the lunar surface; the LRFs takeover from the LAs and begin feeding altitude data. It is interesting to note that while the IMU has been providing velocity, position and attitude data till now in an inertial (non-rotating) frame, it is necessary for the spacecraft to determine lateral velocity with respect to the lunar terrain (rotating with the moon) with higher accuracy.
The LDS (cameras) begin imaging the lunar surface. Images are acquired at regular intervals and compared through image processing algorithms to determine the velocity with relation to the ground. With Main engine throttling down and thrusters keeping the spacecraft orientated while minimizing lateral velocity, the spacecraft descends to the surface.
Powered Fall: This is where our spacecraft's structure and landing gear will be put to the test. You can learn more about how this would work. We also detailed out the mission plan from separation from launch vehicle till Lunar Orbit Capture.
TeamIndus is the official Indian team in the world's largest competition, GLXP mission, to send a robotic explorer to the Moon. TeamIndus will launch the spacecraft abroad the Polar Satellite Launch Vehicle (PSLV) in 2018.
|
|
|